Hey I decided to start a robbie blog this is the latest incarnation.
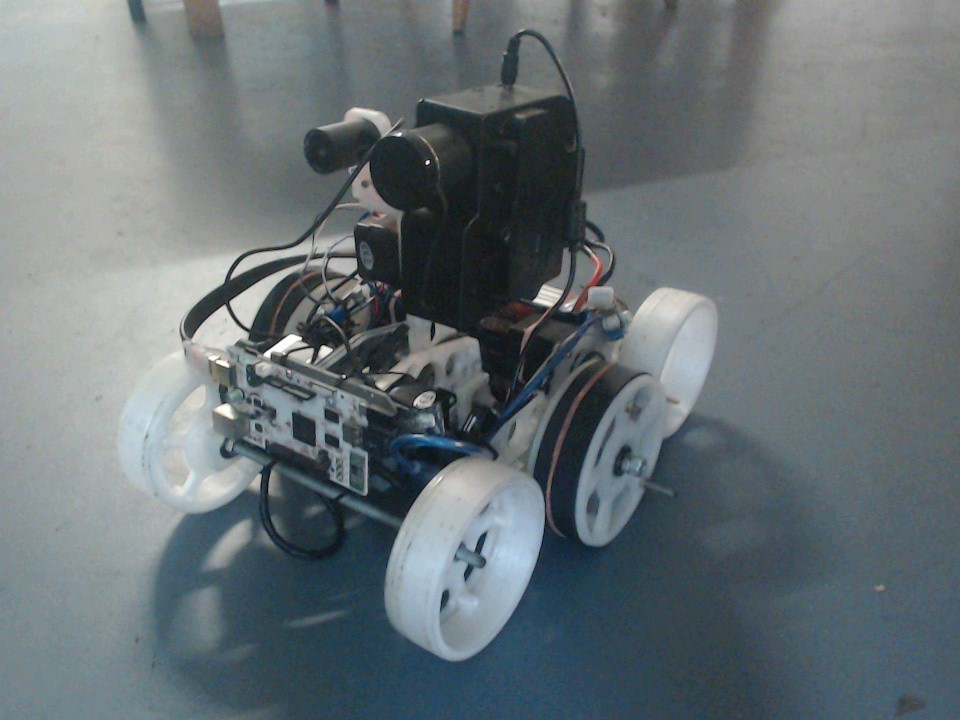
Robbie is essentially stepper motor controlled just like a 3d printer.
There are 5 stepper motors 2 for the central arm one for the camera/projector and 2 for the wheels.
Using a RAMPS 1.4 and an ATMEGA2560 connected to a pcduino runnning armbian with opencv.
Robbie uses a 4s 3300mA for power and has 3 voltage regulators one each for the projector, steppers and pcduino.
You can see the code for the atmega on the blogger link.
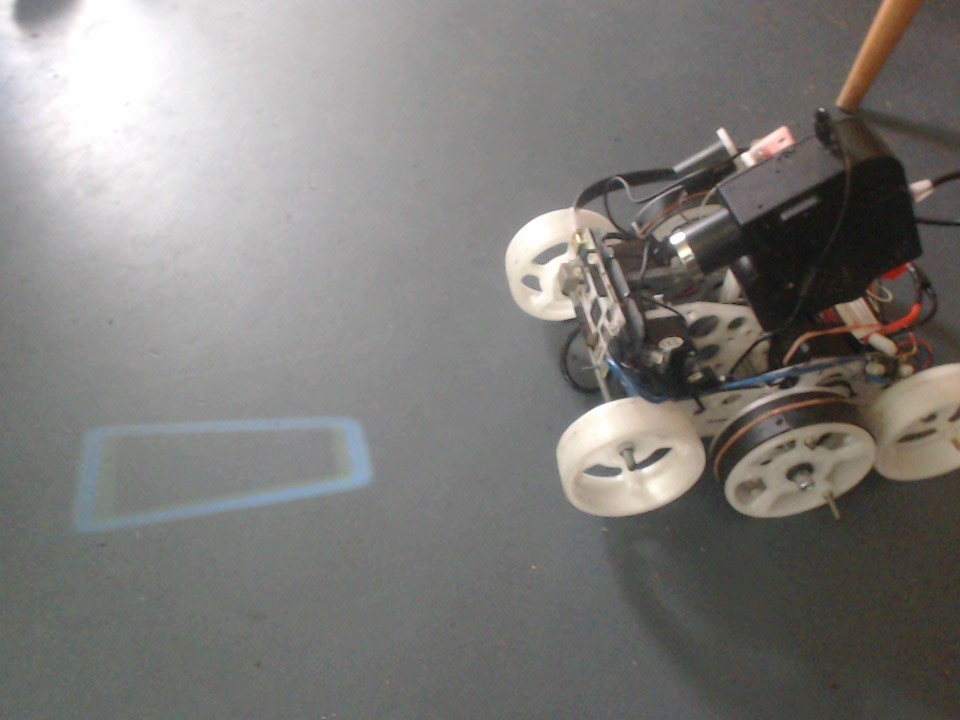
The idea for the projector is the the camera can detect shapes like a rectangle projected onto the landscape to indicate position distance variables. The camera detects the rectangles shape,using opencv, to determine if the landscape is clear ahead.
Hi Pam, Robbie is looking great! If you need more grunt in the pcDuino I am actually working with LinkSprite in Australia and we have some of the more powerful boards like the 8 core ones and ‘arcadia’, etc here that might make your OpenCV stuff work faster. Let me know if you would like me to bring any in to have a tinker with. Also lots of other sensors and stuff that might be helpful.
-Nathan
Thanks Nathan,
Any help would be appreciated. The real pivotal part of robbie is an aaxa st200 pico projector…I am planning to buy one in janurary. Its hard to read the screen with the current projector.
Thanks Pamela